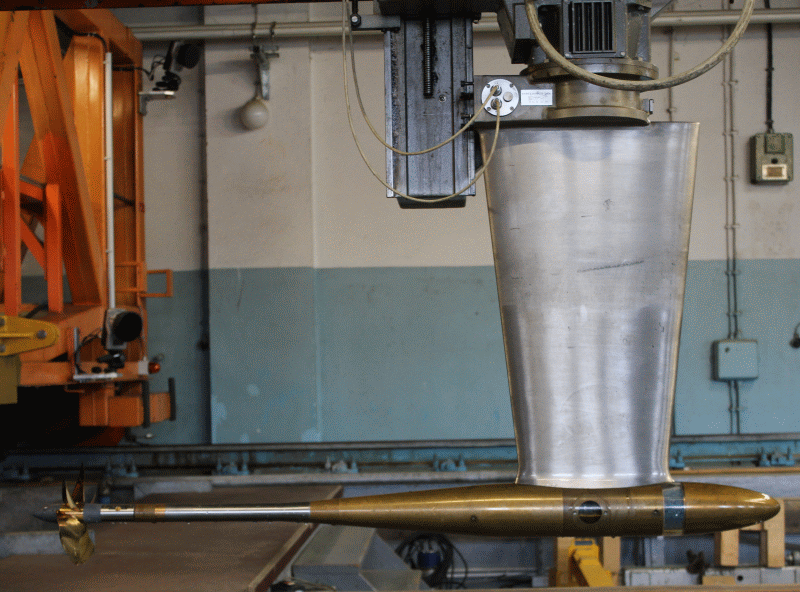
A nozzle is a hydrodynamically optimised shell encircling the blade tips of a propeller. The combination of propeller and nozzle is called a ducted propeller. There are two types of nozzles, the acceleration and the deceleration nozzle. The deceleration nozzle causes a reduction in flow velocity and an increase in pressure in the propeller plane. Deceleration nozzles are therefore used to reduce the cavitation risk for fast ships.
The accelerating nozzle causes an increase in flow velocity and hence a discharge of the propeller. Ducted propellers with an acceleration nozzle are used for highly loaded propellers and propellers with restricted diameters.
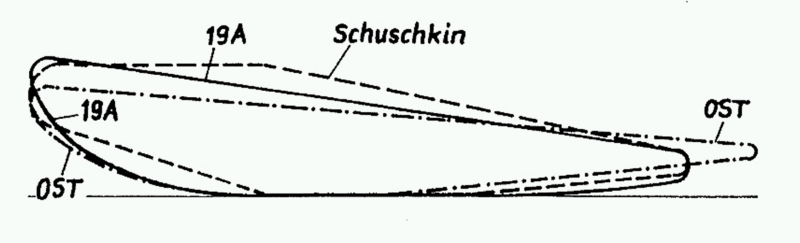
Since its foundation in 1953, the SVA Potsdam has been working on the development and optimisation of ducted propellers for inland and fishing vessels as well as tugs as well as thrusters. In addition to conventional ducted propellers (Wageningen, Schuschkin, OST), unconventional, partially integrated nozzle and controllable pitch propellers have been studied extensively in particular.
Based on a series of tests in the context of an R & D project with a combination of propellers of the Wageningen B-series and OST nozzles, polynomial coefficients were developed for ducted propeller systems with OST nozzles [10]. At lower thrust loads, the OST nozzle profile increases the mass flow through the propeller disc and causes a jet expansion at the nozzle outlet. The characteristics of ducted propellers with OST nozzles can be calculated with polynomial coefficients and used for propulsions prediction.
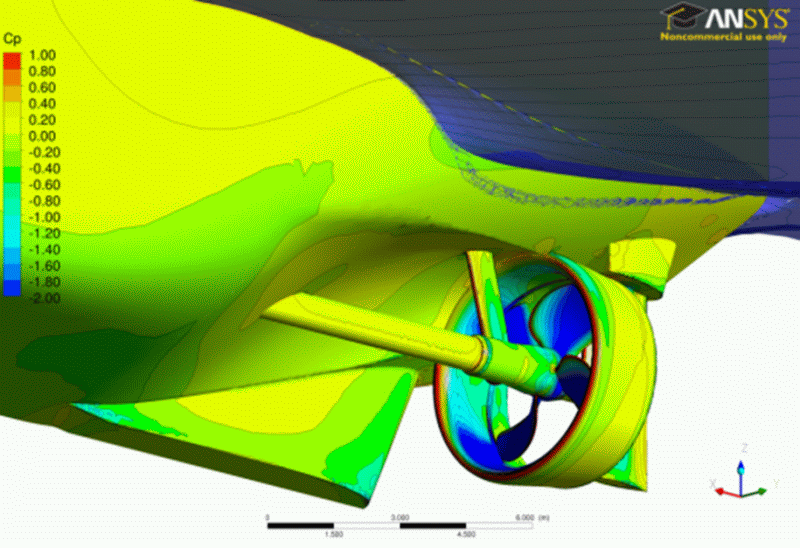
In the field of CFD calculation, research projects were conducted in close cooperation with ANSYS Germany GmbH for ducted propeller calculation. Based on the developed methods, systematic numerical calculations of ducted propellers were implemented in the R & D project “Correlating Z-Drives with Nozzles” to develop a method for Reynolds number correction (conversion of model test results to the full-size version).
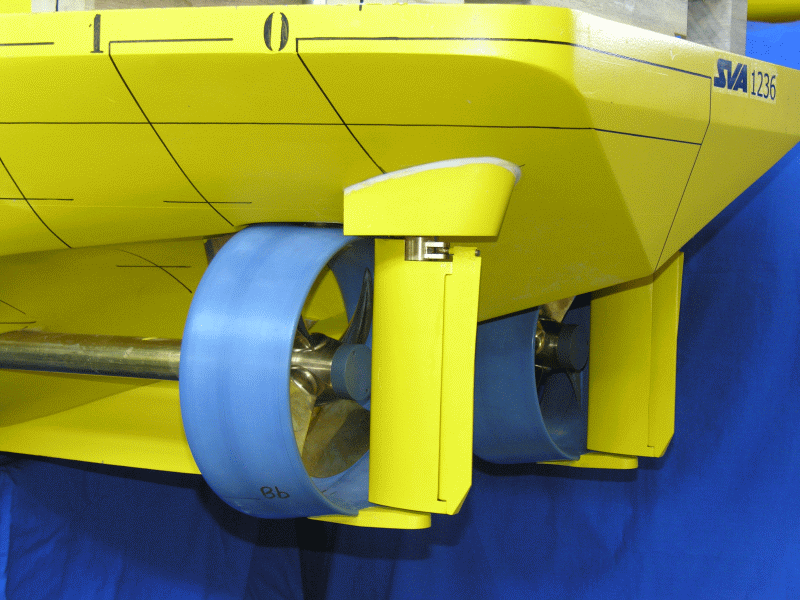
The continued development and validation of the bollard pull and propulsion prediction for tugs with large power capacity has been the subject of R & D projects and industry projects. In the R & D projects “Increasing the Design Safety of Ducted Propeller Systems at Bollard Pull Conditions” and “Reynolds Number Effects on Bollard Pull Predictions” [5], [6] the influences of cavitation and scale on the bollard pull of tugs with ducted propellers were presented in detail. With these results, the risk of thrust break down of ducted propeller can be found in the design stage.
In the R & D project “Forecasting Reliability for the Power Requirement of Tugs with Ducted Propeller Systems”, GeoSim tests and calculations were carried out for tugs at the point of propulsion. The results of these studies have been incorporated into the propulsion forecasting methods for ships with ducted propellers.
Context Related References / Research Projects
[1] Abdel-Maksoud, M.: Convergence Study of Viscous Flow Computations Around a High Loaded Nozzle Propeller, Numerical Towing Tank Symposium NuTTS 2000, Tjärnö, Sweden, September 2000
[2] Abdel-Maksoud, M., Heinke, H.-J.: Scale Effects on Ducted Propellers, 24th Symposium on Naval Hydrodynamics, Fukuoka, Japan, July 2002
[3] Gutsche, F.: Düsenpropeller in Theorie und Experiment, Jahrbuch der STG, Bd.53, 1959
[4] Heinke, H.-J., Philipp, O.: Development of a skew blade shape for ducted controllable pitch propeller systems”, Proceedings, PROPCAV’95, Newcastle, 1995
[5] Heinke, H.-J., Hellwig, K.: Aspekte der Pfahlzugprognose für Schlepper großer Leistung, 104. Hauptversammlung der STG, Hamburg, November 2009
[6] Mertes, P., Heinke, H.-J.: Aspects of the Design Procedure for Propellers Providing Maximum Bollard Pull, ITS 2008, Singapore, May 2008
[7] Philipp, O., Heinke, H.-J., Müller, E.: Die Düsenform – ein relevanter Parameter der Effizienz von Düsen-Propeller-Systemen, STG-Sprechtag „Hydrodynamik schneller Schiffe und ummantelter Propeller“, Berlin, Potsdam, September 1993
[8] Philipp, O., Heinke, H.-J., Binek, H.: Contribution of Hydrodynamics for the Calculation of Ducted Units for Ships at Shallow Water, HYDRONAV’ 95, Gdansk, November 1995
[9] Schroeder, G.: Wirkungsgrad von Düsenpropellern mit unterschiedlicher Düsen- und Propellerform, Schiffbautechnik 17 (1967) 8
[10] Schulze, R., Manke, H.: Propellersysteme mit Ostdüsen, HANSA, 137 (2000) 2