Hauptparameter der Waagen |
|||
| Parameter | R37 | R35X | |
| Komponente in x-Richtung (x) | [N] | 800 | 500 |
| Komponenten in y-Richtung (y1, y2) | [N] | 800 | — |
| Komponenten in z-Richtung (z1, z2, z3) | [N] | 500 | — |
Hauptparameter der Dynamometer |
||||
| Parameter | J25 | H36 | R45 | |
| Schub Propeller | Tmax [N] | 3000 | 2000 | 400 |
| Drehmoment Propeller | Qmax [Nm] | 150 | 100 | 15 |
| Drehzahl Propeller | nmax [s-1] | 60 | 50 | 50 |
| Wellenneigung | [°] | +15 bis -10 | ||
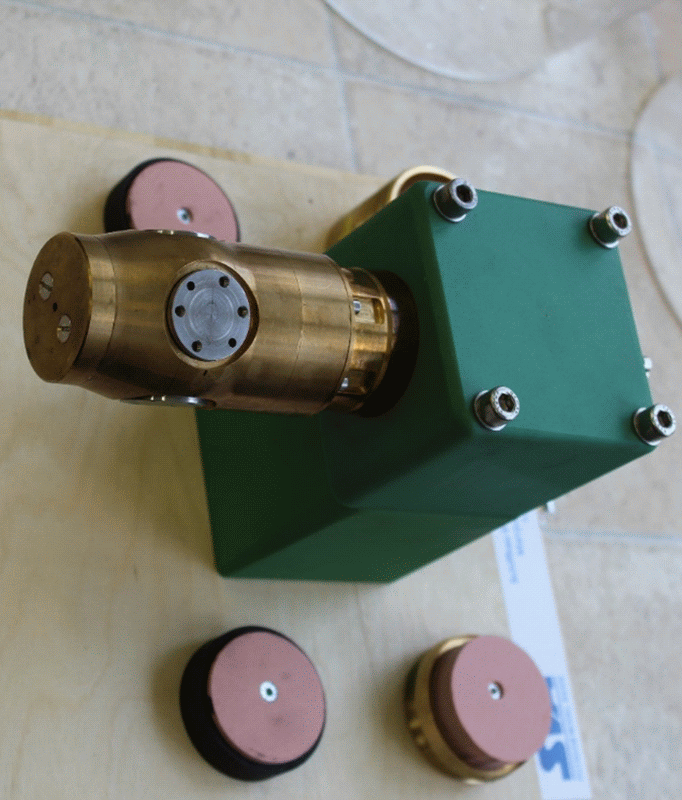
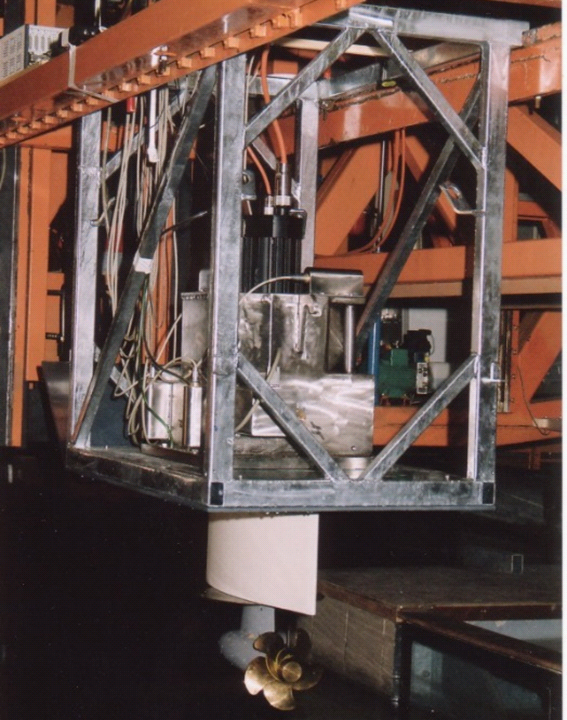
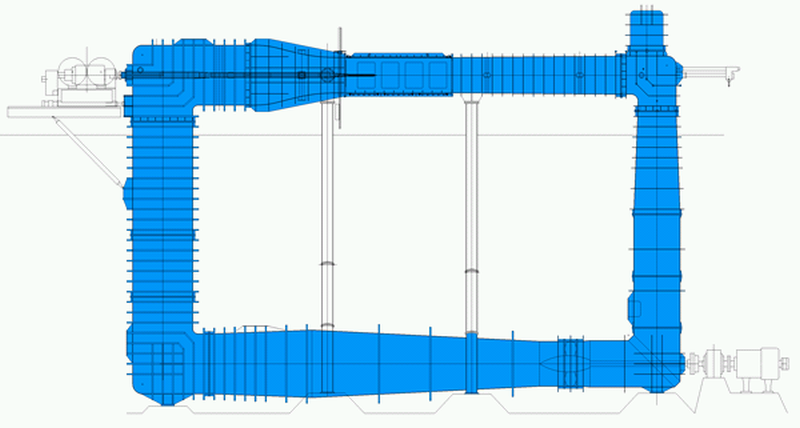
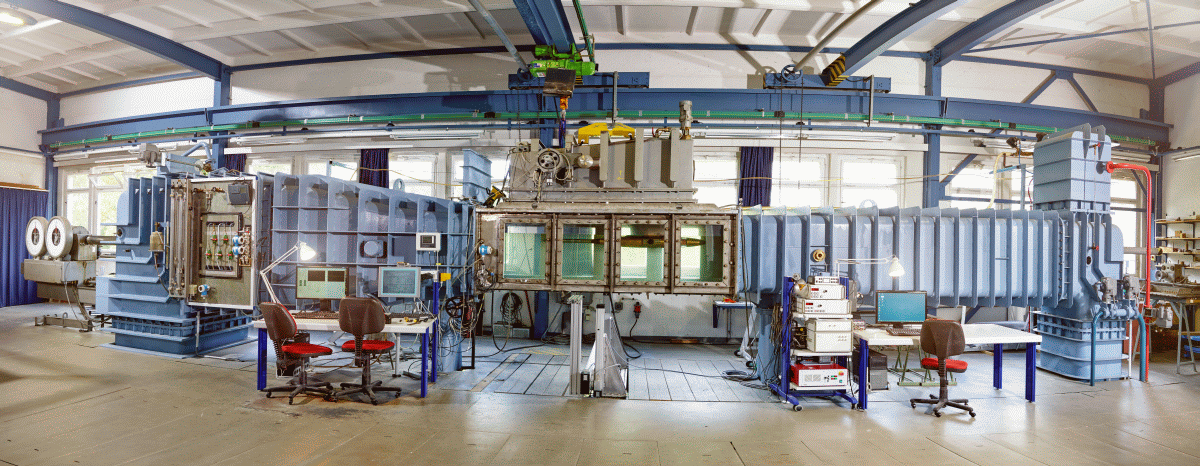
Die SVA Potsdam betreibt den Kavitationstunnel K15A von Kempf & Remmers. Es stehen zwei Messtrecken zur Verfügung. Die Länge zwischen den beiden vertikalen Teilen des Kavitationstunnels beträgt 12 m, die Höhe zwischen den horizontalen Teilen 7 m. Der Impeller des Kavitationstunnels wird durch einen 100 kW Gleichstrommotor angetrieben.Der Kavitationstunnel verfügt über die Dynamometer J25 und H36. Beide Dynamometer können allein oder zusammen betrieben werden, so dass Versuche mit Gegenlauf- und/oder Tandempropellern durchgeführt werden können. Zusätzlich stehen die wasser- und druckdichten Innenantriebsdynamometer vom Typ R45 für spezielle Versuche (z.B. überlappende Propeller) zur Verfügung.
Die Geschwindigkeit in der Messstrecke des Kavitationstunnels wird aus der Druckdifferenz vor und hinter der Düse bestimmt (Prinzip der Venturidüse). Der Druck in der Messstrecke sowie der atmosphärische Druck werden ebenfalls mit Drucksensoren bestimmt.
Für die Messung von Kräften an Profilen, Tragflügeln, Düsen und Rudern stehen die Waagen R37 und R35X zur Verfügung. Örtliche Geschwindigkeiten werden standardmäßig mit einem Laser (Powersight LDV (TSI)) gemessen. Für die Messung von Geschwindigkeitsfeldern kann auch ein PIV-Messsystem von TSI eingesetzt werden.
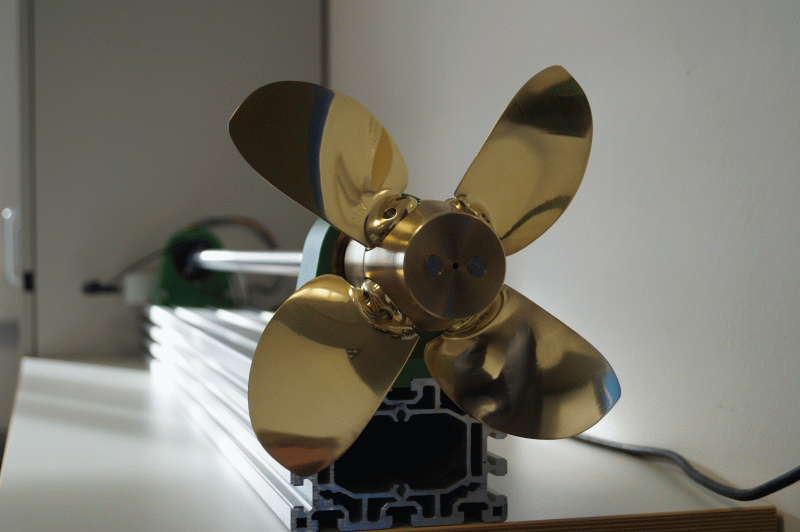
In der kleinen Messtrecke werden überwiegend Kavitationsversuche mit Propellern für schnelle Schiffe und Sonderversuche, wie Messungen an Profilen und Tragflügeln, Geschwindigkeitsmessungen mit LDV oder PIV, Erosionsversuche sowie Kalibrierungen von Geschwindigkeitsmesssystemen durchgeführt.
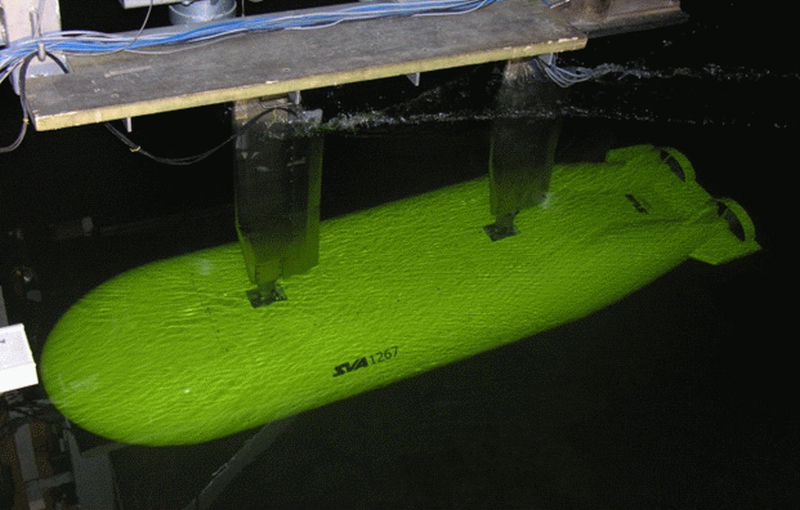
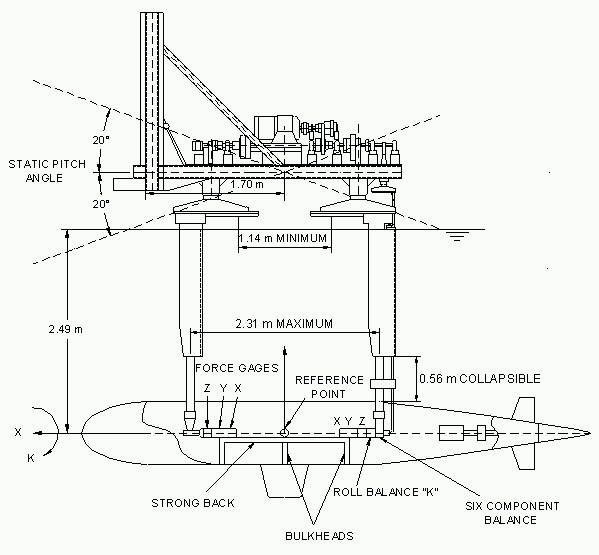
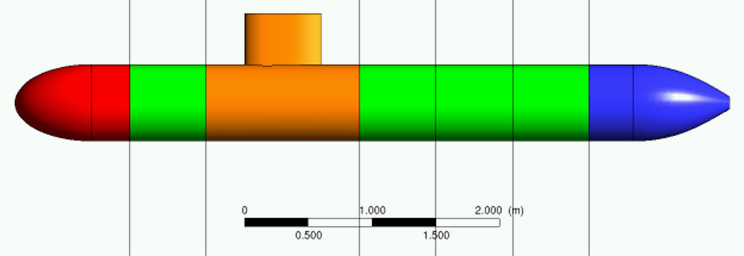
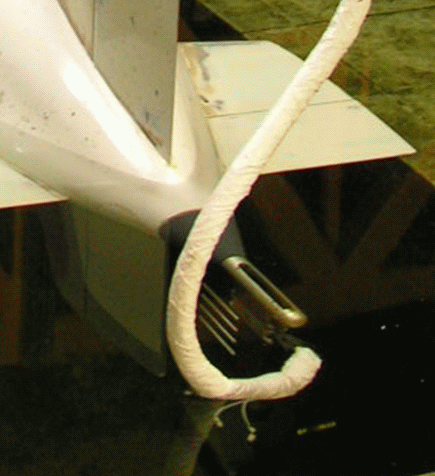
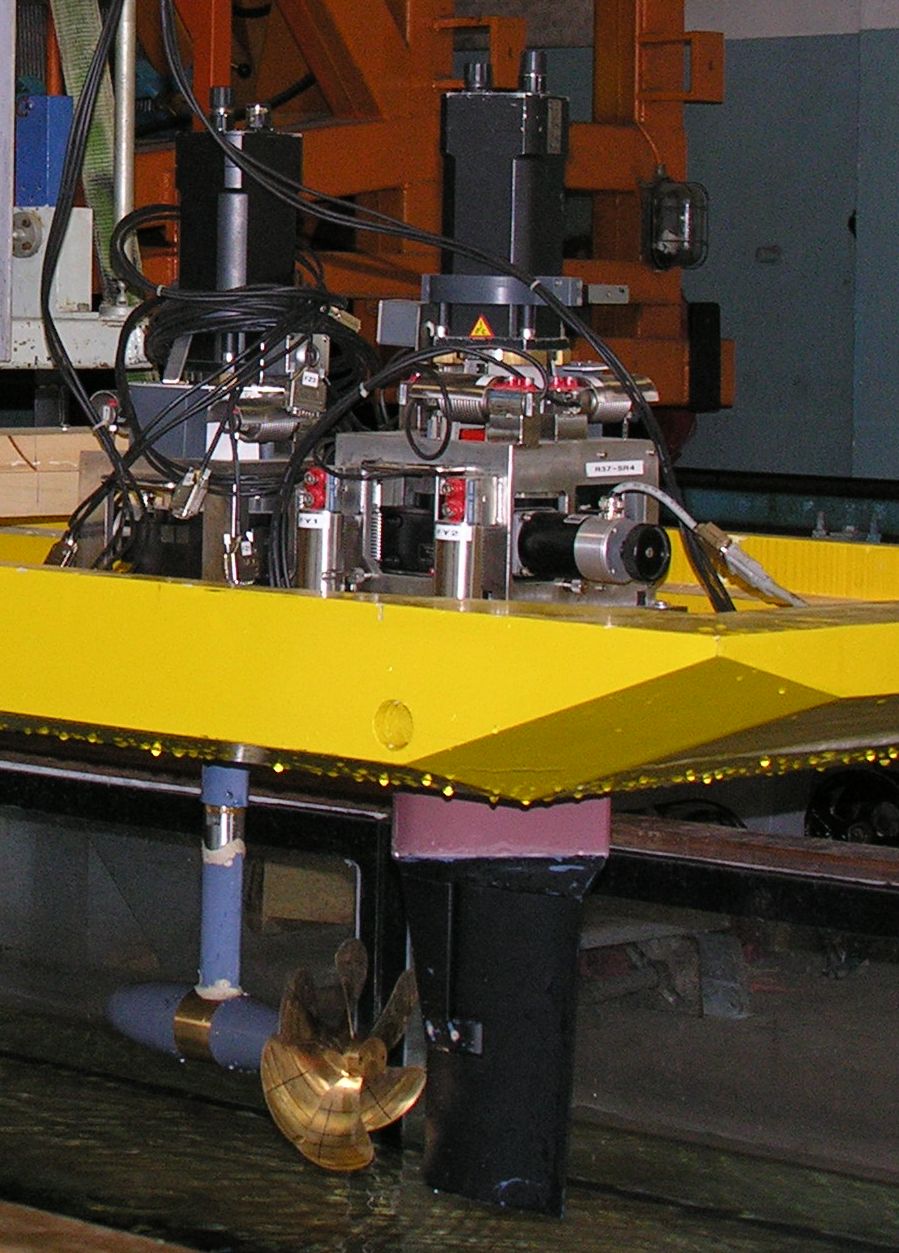
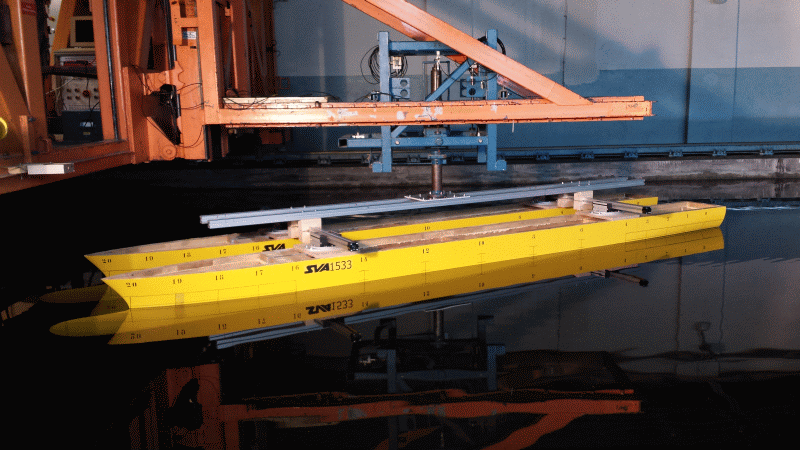
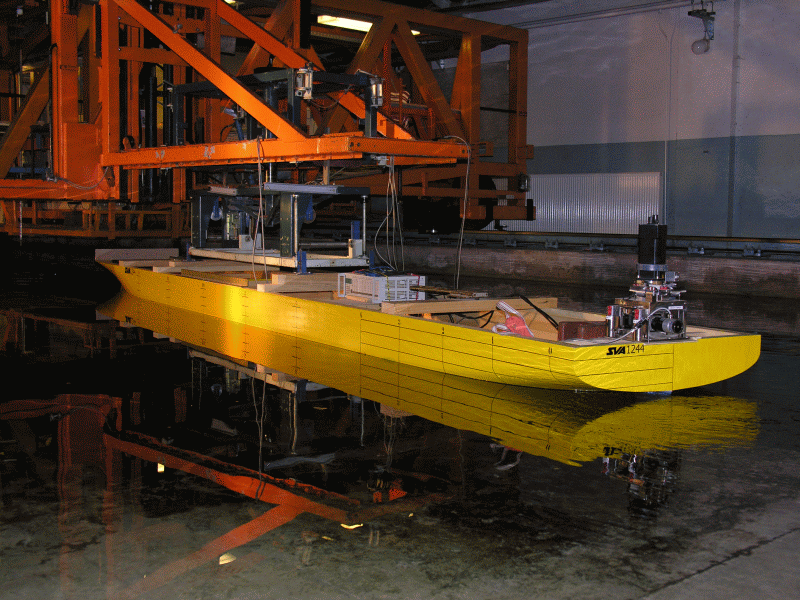
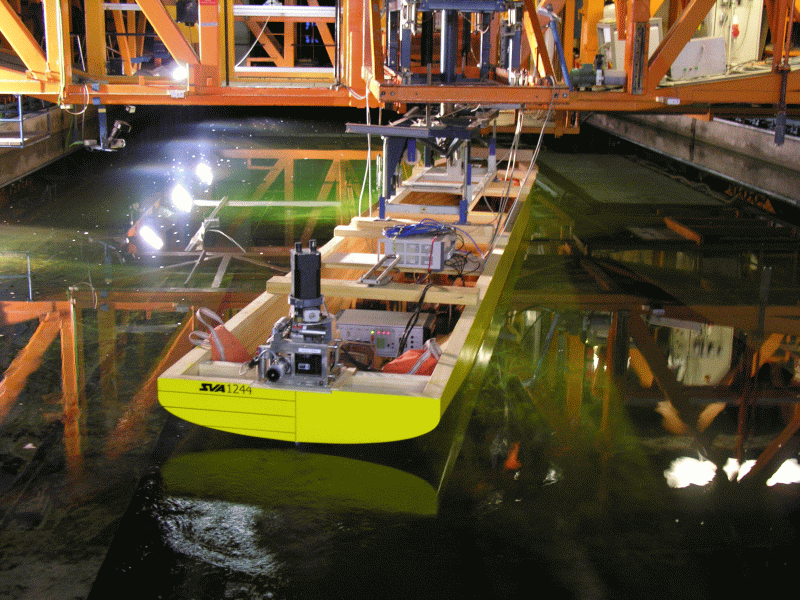
Die Untersuchung des Kavitationsverhaltens des Propellers im Nachstromfeld des Schiffes und die Messung der propellerinduzierten Druckschwankungen erfolgen in der großen Messstrecke des Kavitationstunnels. Die Simulation des Nachstromfeldes, berechnet für die Reynoldszahl der Großausführung, erfolgt in der SVA mit einem Dummymodell und zusätzlichen Sieben [1], [2], [3], [4]. Im Dummymodell ist das Dynamometer H36 integriert. Die Dummymodelle sind bis zu 2.60 m lang und im Hinterschiffsbereich dem Schiff geometrisch ähnlich. Oberhalb des Propellers werden im Dummymodell Drucksensoren angeordnet. Mit dem Dummymodell und Zusatzsieben wird in der SVA standardmäßig das mit CFD-Verfahren berechnete Nachstromfeld der Großausführung simuliert.
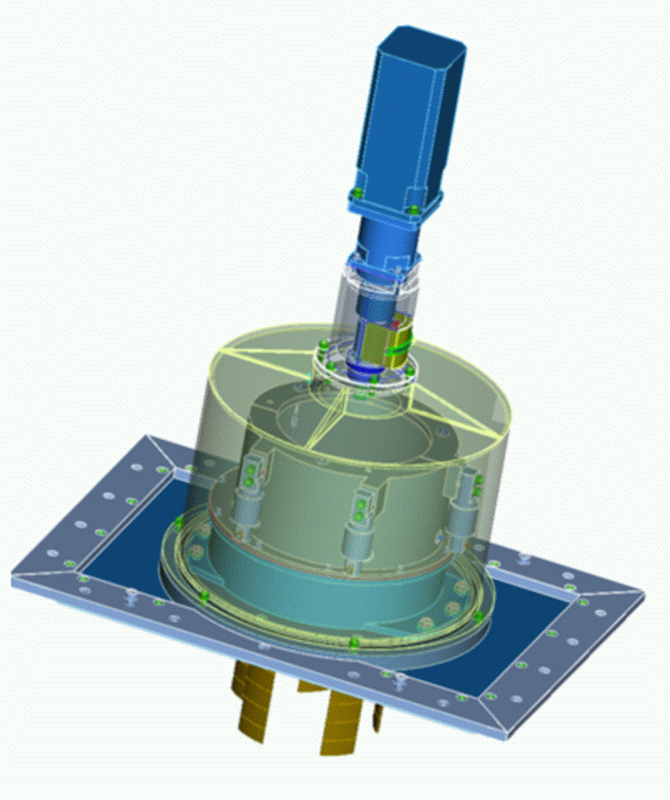
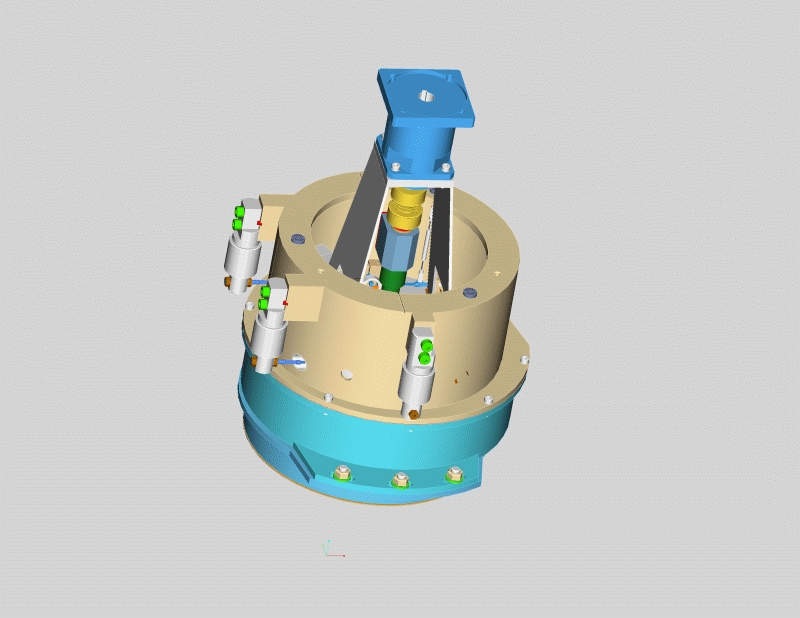
Für die Untersuchung des Kavitationsverhaltens von Thrustern und Podded Drives, sowie von Voith-Schneider-Propellern oder Ruderdüsen wurden spezielle Messsysteme entwickelt. Das gleiche gilt für Kraft-und Momentenmessungen am Einzelflügel von Verstellpropellern bei Kavitationsähnlichkeit.
Lesen Sie hier mehr über die verschiedenen Versuche und Objekte im Kavitationstunnel.
Technische Spezifikationen der Messstrecken |
||
| Parameter | Messstrecke 1 | Messstrecke 2 |
| Messstreckenlänge | 2600 mm | 2600 mm |
| Messstreckenquerschnitt | 600 mm x 600 mm | 850 mm x 850 mm |
| Kontraktionsverhältnis der Düse | 5.96 : 1 | 2.93 : 1 |
| Maximale Geschwindigkeit in der Messstrecke | 13 m/s | 7.5 m/s |
| Variation des Messstreckendrucks | -970 mbar bis 1200 mbar | -950 mbar bis 1200 mbar |
Themenbezogene Referenzen/Forschungsprojekte
[1] Selke, W., Heinke, H.-J.: Propelleruntersuchungen im Kavitationstunnel der Schiffbau-Versuchsanstalt Potsdam, Jahrbuch der STG, 84. Band, 1990
[2] Schmidt, D., Selke, W., Gerchev, G.: Comparative Joint Investigations in the Cavitation Tunnels of SVA and BSHC on the Prediction of Propeller-Induced Pressure Pulses, Schiffbauforschung 31 (1992) 1
[3] Heinke, H.-J.: The Influence of Test Parameters and Wake Field Simulation on the Cavitation and the Propeller Induced Pressure Fluctuations, Jahrbuch der Schiffbautechnischen Gesellschaft, 97. Band, 2003
[4] Kleinwächter, A., Hellwig-Rieck, K., Ebert, E., Kostbade, R., Heinke, H.-J., Damaschke, N. A.: PIV as a Novel Full-Scale Measurement Technique in Cavitation Research, Fourth International Symposium on Marine Propulsors, smp’15, Austin, Texas, USA, 2015