Hauptparameter |
H29 | H39 | |
| Schub Propeller | Tmax [N] | 400 | 1000 |
| Drehmoment Propeller | Qmax [Nm] | 15 | 55 |
| Propellerdrehzahl | nmax [s-1] | 60 | 60 |
| Max. Neigung Propellerwelle | [°] | 30 | 30 |
Hauptparameter |
R25 | R31 | R73 | R40 | |
| Schub Propeller | Tmax [N] | 100 | 250 | 600 | 150 |
| Drehmoment Propeller | Qmax [Nm] | 4 | 10 | 30 | 6 |
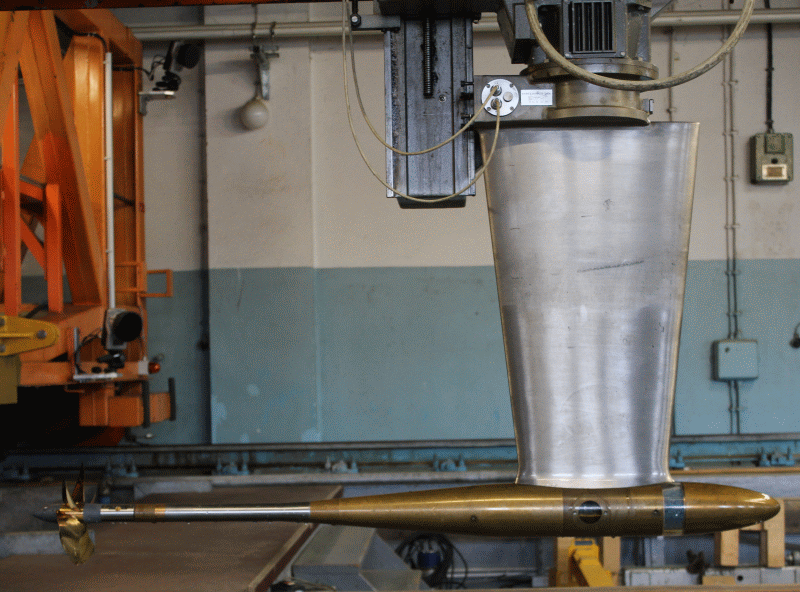
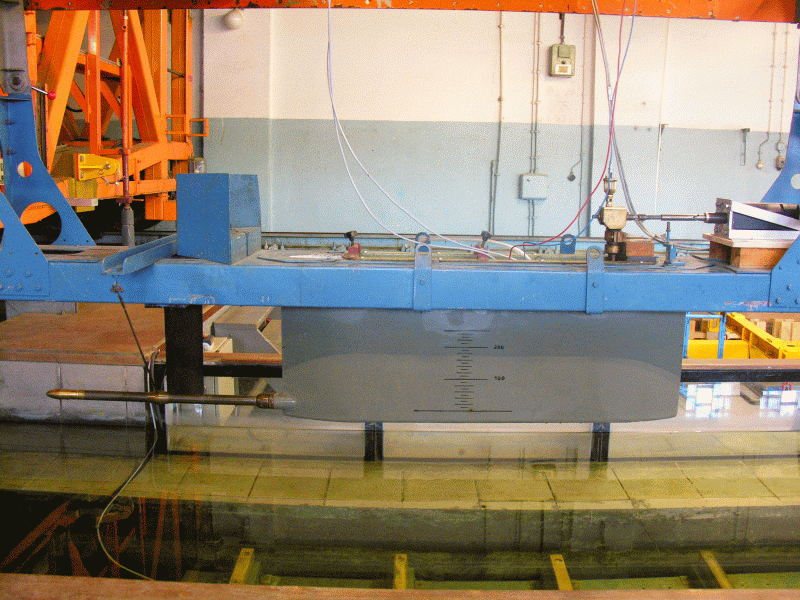
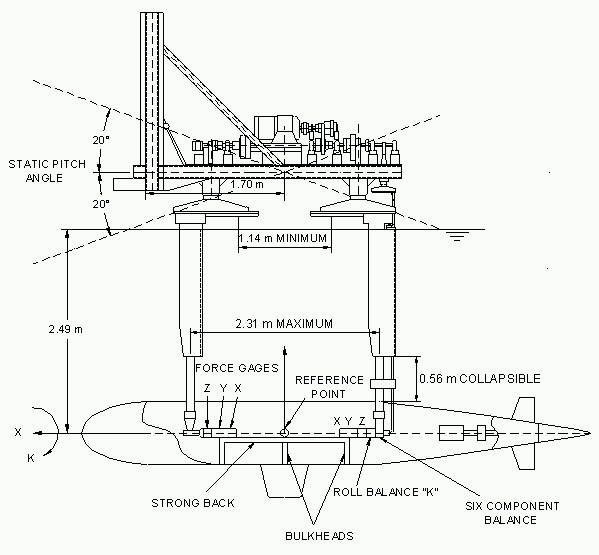
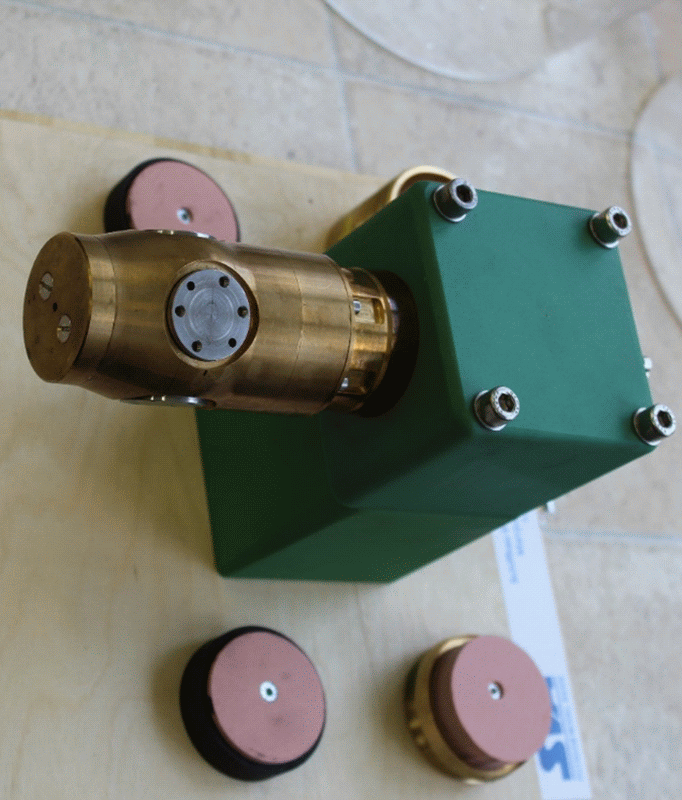
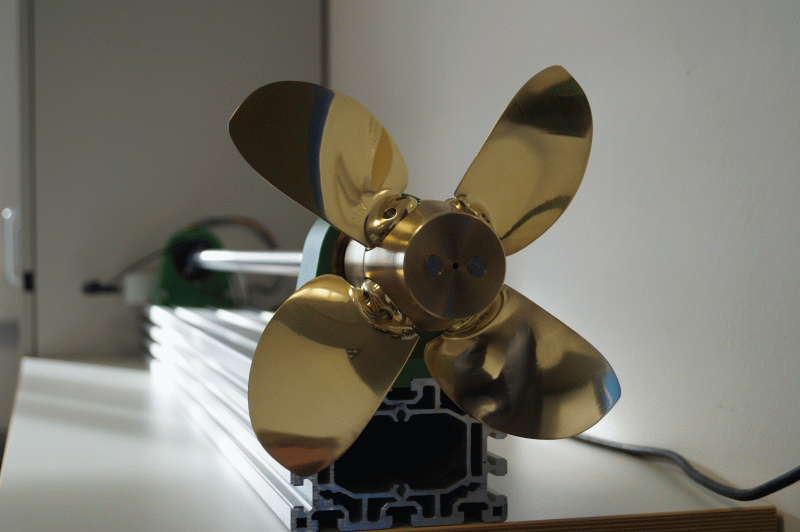
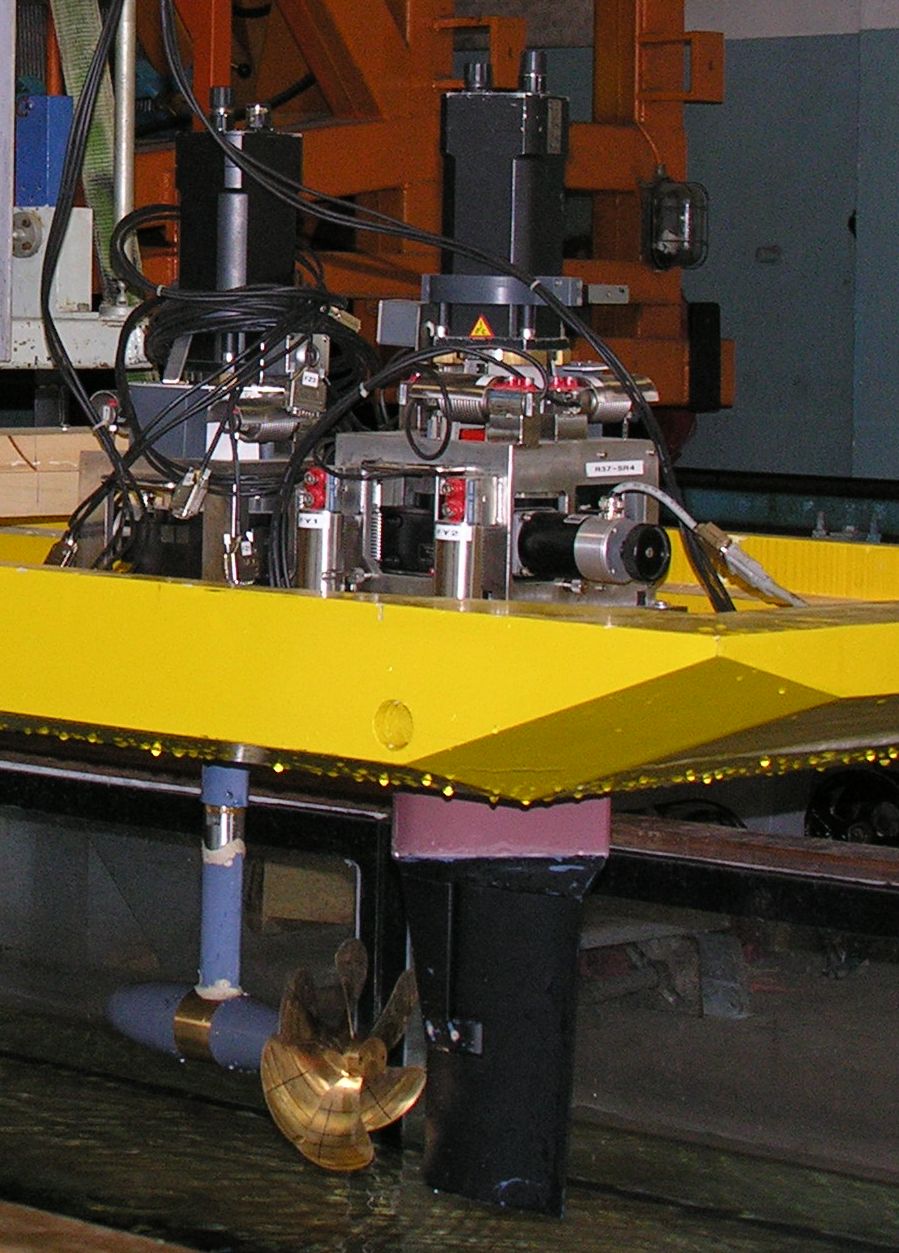
Für Propellerfreifahrtversuche in der Schlepprinne werden hauptsächlich Dynamometer der Typen H29 und H39 von Kempf & Remmers genutzt. Beide Dynamometer messen Schub und Drehmoment des Propellers. An beiden Geräten kann zusätzlich eine Messwaage für den Düsenschub montiert werden. Das Gerät H39 kann mit einer Welle ausgerüstet werden, die die Messung der Querkräfte des Propellers ermöglicht.
Die Dynamometer ermöglichen die Durchführung der Versuche mit Wellenneigung.
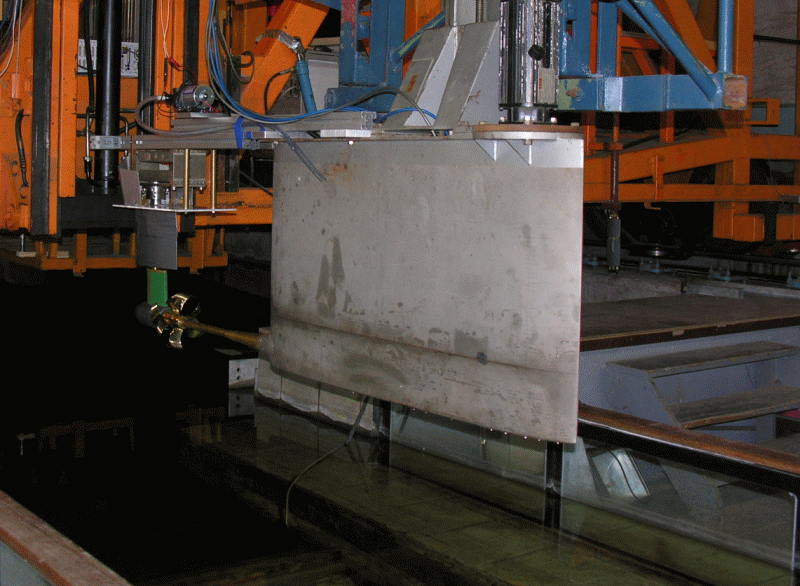
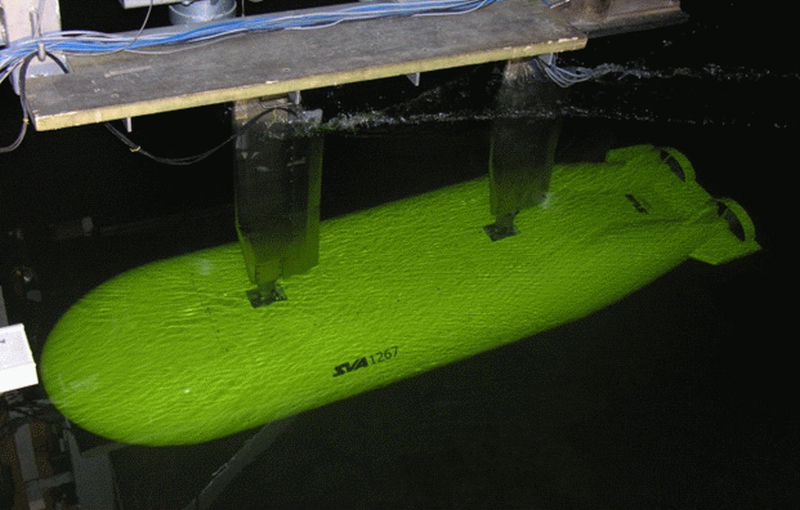
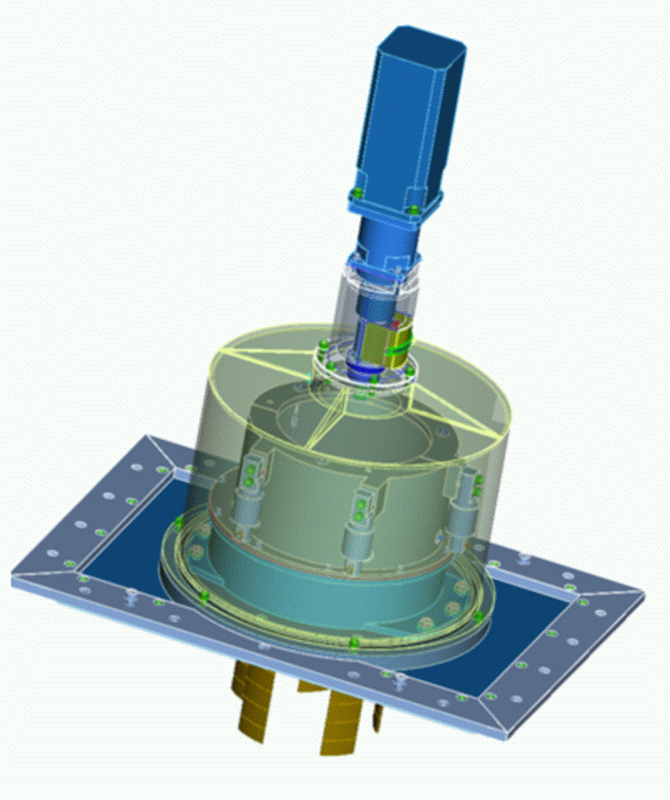
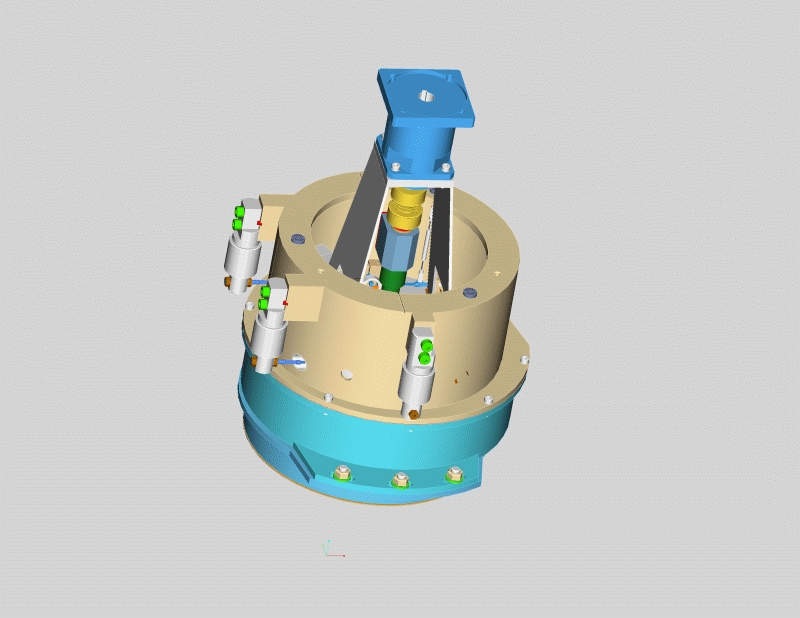
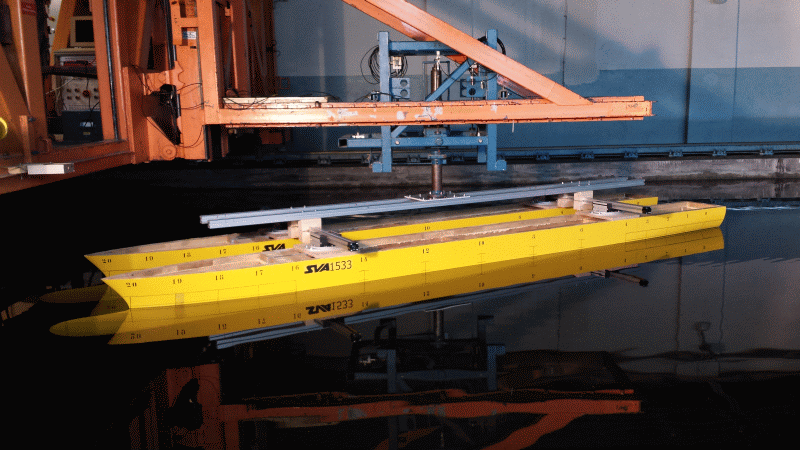
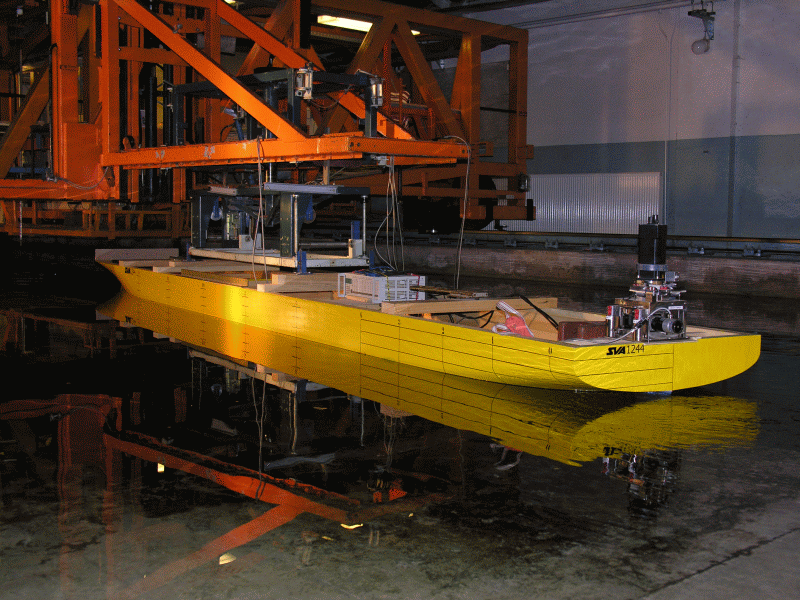
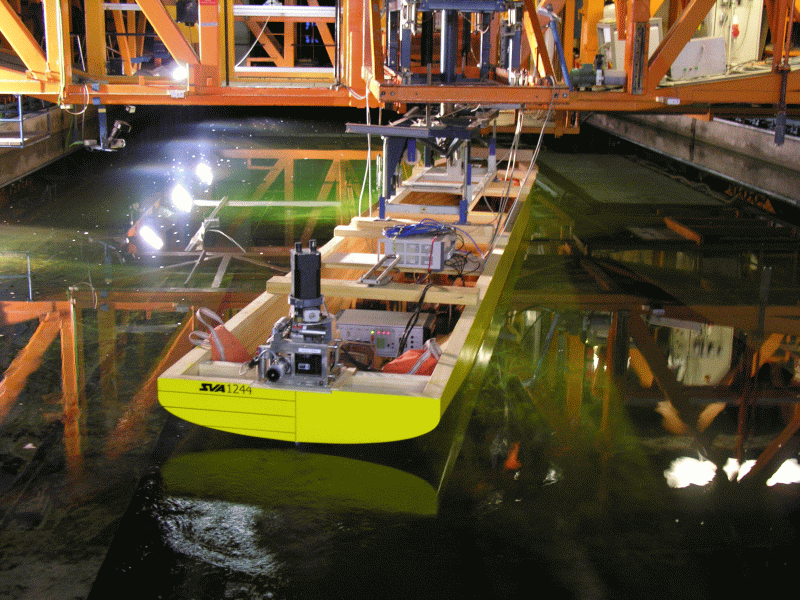
Freifahrtkästen FK1, FK4
Die Freifahrtkästen FK1 und FK4 bieten die Möglichkeit, Freifahrtversuche mit den Innenantriebsdynamometern für Schiffsmodelle durchzuführen. Verwendet werden dafür an den Messbereich angepasste Dynamometer von Kempf & Remmers sowie für den FK4 das Gegenlaufdynamometer R40 von Kempf & Remmers. Die Messwaage für Düsenschub kann an beiden Geräten zusätzlich montiert werden.